수학적 표현 ( Mathematical Modeling )
: 현실의 상황을 컴퓨터가 분석할 수 있도록 수학적으로 표현하는 방법.

System의 경우 적분을 이용한 계산은 어렵기 때문에 미분을 이용한 계산을 진행하며, Laplace 방정식을 통해 시간영역의 미분 방정식을 주파수영역으로 변환하여 대수적으로 해결할 수 있도록 한다.
이 경우 System을 부분적으로 표현이 가능하며, 복잡한 System도 부분 System Model 간의 입출력을 통해 표현 가능하다.
자동제어에서의 Laplace 변환 ( Laplace Transform in Automatic Control )
: Laplace 변환의 경우 -무한대 ~ 무한대의 구간을 가졌으나, 자동제어에서 t<0인 경우는 제어를 시작하지 않은 시점이므로 관심이 없는 영역이다. 그러므로 0- ~ 무한대의 구간을 가진다.


역 라플라스 변환 이후 u(t)가 있는 이유는 t<0 에서는 0, t>0 에서는 1인 u(t)의 특성을 이용해 t<0 구간에서만 값을 가짐을 표현한 것이다.
임펄스 함수 ( Impulse Function )
: 0초 부근에서 무한대의 값을 가지는 1의 면적을 가진 함수이다.
라플라스 변환하면 1이되는 특징이 있다.

라플라스 변환 ( Laplace Transform )


부분 분수 분해 ( Partial Fraction Expansion )
: 다차 다항식이 분모 분자에 존재하는 경우 역 라플라스 변환이 어렵기에 부분분수를 이용하여 분리한 뒤 역 라플라스 변환을 통해 시간 영역에서의 출력을 얻어낸다.

1. 서로다른 실수 / 중근이 포함된 경우
: K1의 경우 (s+p1) 이외의 s에 -p1을 대입한 결과, K2의 경우 (s+p2) 이외의 s에 -p2을 대입한 결과이다.
만약 (s+pm)이 중근이라면, (s+pm), (s+pm)<sup>2</sup>로 각각 존재한다.

K1 = 2, K2 = -2 이다.

K1 = 2, K2 = -2, K3 = -2 이다.
2. 허근이 존재하는경우.
: 아래 공식을 이용하여 해결한다.

전달 함수 ( Transfer Function )
: 입력과 출력을 나타낸 비율이다.

모든 system은 출력이 c(t), 입력이 r(t)이고 a,b,n,m만 값이 다른 형태로 표현이 가능하다.

이를 입력과 출력으로 정리하면, 위와같이 정리할 수 있고, 이 경우 입 출력에 대한 내용이 분리되어 있어 system을 움직임을 표현하는 값을 통해 입력과 출력의 관계를 확인하기 편리하다.
C(s) = R(s)G(s)와 같이 정리하여 원하는 입력을 system에 입력한 뒤 역 라플라스 변환을 통해 시간 영역에서의 움직임을 살펴볼 수 있다.
회로해석 ( Circuit Translation )
: 전력을 생성하지 않고 소비하거나 저장, 방출만 하는 소자인 수동소자의 회로에서의 동작을 분석한다.

각 소자의 특성을 이용해 수식을 세운 뒤 시간영역에서 주파수 영역으로 변환하여 회로를 해석한다.
시간영역에서 식을 세우더라도 결국 주파수 영역에서 계산하기 때문에 먼저 라플라스 변환을 한 뒤 회로해석을 진행한다.

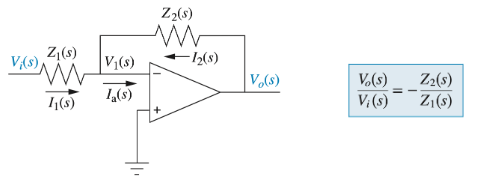
연산 증폭기 ( Op Amp )
: 입력 전압의 차이를 이용하여 증폭하는 기능을 가진 다음 증폭기는 아래와 같은 특징을 지닌다.

v(t)는 실제 입력이며, 이상적인 경우 높은 입력 임피던스로 인해 Op Amp회로 입력 전류는 0이 된다. 또한 낮은 출력 임피던스( =0 )를 가진다.
해당 소자는 반전(inverting), 비반전(non-inverting)의 기능을 할 수 있다.

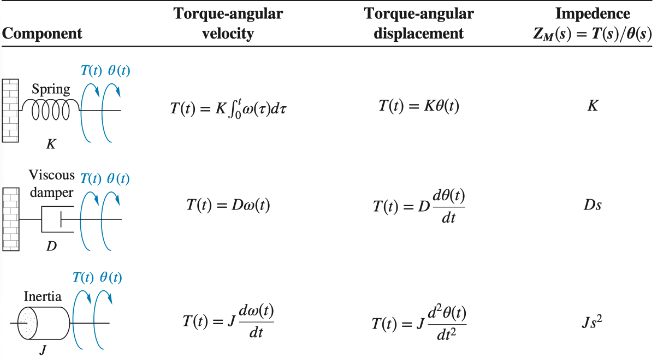
기계 시스템 해석 ( Translate of Mechanical System )
: 회로와 마찬가지로 실제 동작을 시스템으로 해석할 수 있다.

스프링의 경우 외력에 의한 반대 방향으로 복원력을 가지며, 댐퍼의 경우 반대방향으로 저항력을 가지며, 물체는 반대 방향으로 관성을 지닌다.
이 또한 미리 주파수 영역으로 변환한 뒤 해석한다.

* 하나의 물체에 대한 해석을 어렵지 않지만 여러 물체에 대한 해석은 복잡하다.
이 경우 물체가 움직임으로 인해 발생하는 복원력, 저항력 등에대한 수식과 다른 물체의 움직임으로 인해 발생하는 저항력, 복원력에 의한 운동을 수식으로 세워 계산한다.
이러한 회로 해석 방식은 돌림힘과 기어에서도 동일하게 적용된다.

'학과 공부 ( Study ) > 자동제어 ( Automatic Control )' 카테고리의 다른 글
| 제어 시스템 ( Control System ) 이란? (0) | 2023.03.13 |
|---|